Avare
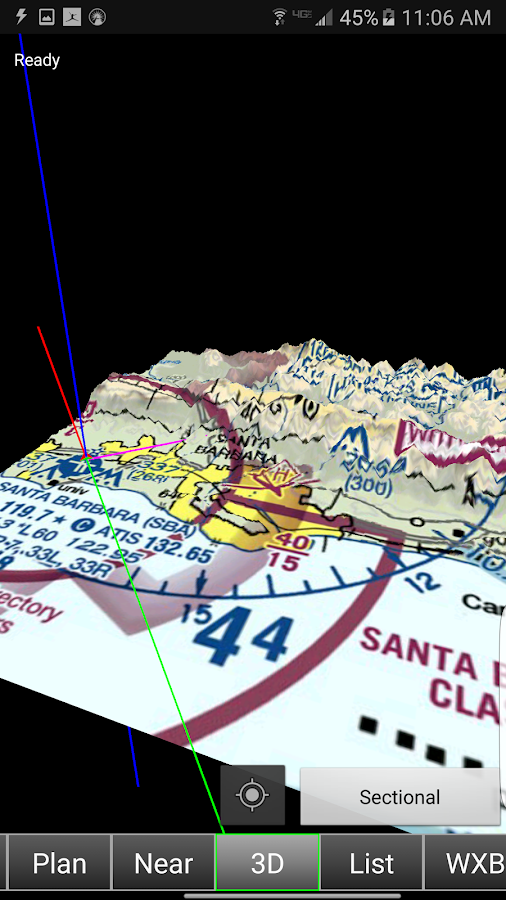 New Synthetic Vision PFD Tab (WIP, will update soon)
New Synthetic Vision PFD Tab (WIP, will update soon)Calibrated airspeed from air data collector
Engine data from engine data collector. Default setup accommodates oil pres/temp, fuel pressure, tach, cht, egt. multi-channel cht/egt can be done by adding a second engine data collector module.
Magnetic compass heading from magnetometer
Autopilot commanding for heading and altitude hold, navigation and airspeed hold climb.
Data Collecting
 SportVFR Air/Engine Data Collector - Robustly generic data collector supports 13 total channels of mixed analog / digital inputs and outputs. Uses off-the-shelf components (ATMega32U Pro Micro) with a simple board to interface a convenient DB-25 connector. Accommodates solder-in pull down/up resistors for most resistance type sensors (Oil Temp, Oil Pres... etc).
SportVFR Air/Engine Data Collector - Robustly generic data collector supports 13 total channels of mixed analog / digital inputs and outputs. Uses off-the-shelf components (ATMega32U Pro Micro) with a simple board to interface a convenient DB-25 connector. Accommodates solder-in pull down/up resistors for most resistance type sensors (Oil Temp, Oil Pres... etc). 
GPIO breakdown-
8 channels of Analog Input or Digital I/O
5 channels of Digital only I/O
5 channels of PWM output (for Servos or dimmers)
Firware supported daughter boards:
HMC5883L - I2C magnetometer
BMP180 - I2C pressure sensor
Tachometer - HAL-effect (channel 7)
Bluetooth is supplied via HC-06 serial transceiver attached to built-in UART TX/RX
Autopilot
Naze32 Pro 10-DOF quad controller
Cleanflight iNAV firmware

Commanding from Android device is via MultiWii Serial Protocol. It directly uses the heading hold and steer modes for autopilot commanding and software sets the servo position for normal trim function.
Two large-scale/heavy duty, metal gear, brushless R/C Servo connected to normal aircraft trim tabs on elevator and aileron.

Display Device
Any Android 4+ GPS enabled device. No accellerometer or gyroscope required, but will use it if present.
Prefered devices:
Nexus 7 Tablet
Android 2DIN CarPC 1080P
hello! Where are yo with this project? It looks very promising. Cheers
ReplyDeleteBob
Your blog is so proffesional,when will you need my Molicel P42A cell, Bruce :-)))
ReplyDelete